AIはいつ手を引くべきか?:人間が介入を望むタイミングをエージェントに教える
カーネギーメロン大学の研究チームは、人間とAIエージェントの協調作業における介入タイミングを予測するモデルを開発し、実世界の人間-エージェント協調セッションから収集したCowCorpusデータセットを公開した。
キーポイント
研究の焦点転換:自律性から協調性へ
従来のエンドツーエンド自律パイプラインの最適化から、人間がいつ介入するかを予測する「介入予測モデル」の開発に焦点を移し、人間とAIの効果的な協調を目指している。
CowCorpusデータセットの作成
実世界のユーザー20名から収集した400セッション、4,200以上のインタリーブ(交互)行動を含む、人間とエージェントの協調作業軌跡データセットを構築し、介入瞬間のステップレベル注釈を付与した。
CowPilotツールの活用
任意のウェブサイトで使用可能な汎用Chrome拡張機能として開発されたオープンソースツールCowPilotを使用し、実世界での協調作業データを収集した。
介入認識エージェントの実現
介入予測モデルを統合した新しいパイプラインにより、ユーザーが必要な時だけ関与する「介入認識エージェント」の開発が可能になった。
CowCorpusデータセットの構成
Mind2Webデータセットの10の標準タスクと参加者が自由に選択した10の自由形式タスクから構成され、9種類のタスクカテゴリーをカバーしている。
ユーザーの介入パターンの4つのクラスター
k-meansクラスタリングにより、介入頻度・タイミング・制御共有の観点から、Takeover、Hands-on、Hands-off、Collaborativeの4つの異なるユーザーグループが特定された。
人間の介入パターンの分類とモデリング
人間とエージェントの相互作用を、Takeover、Hands-on、Hands-off、Collaborativeの4つのパターンに分類し、POMDPを用いてモデル化している。
影響分析・編集コメントを表示
影響分析
この研究は、AIエージェントの実用化における重要な課題である「人間との協調」に焦点を当て、実証的なアプローチで解決策を提示している。データセットとツールの公開により、学界・産業界全体で人間中心のAIシステム開発が加速する可能性がある。
編集コメント
AIの自律性だけでなく、人間との協調性に焦点を当てた実用的な研究。データセットの公開により、この分野の研究基盤が強化される点が特に価値がある。
私たちは同じアノテーターを再招集し、新しいシステムを評価してもらいました。その結果、ユーザー評価の有用性が平均+26.5%向上したことが確認されました。下図は、質問した8項目それぞれに対する個々の回答を示しています。重要な点は、基盤となる実行エージェントはCowPilotから変更されていないことです。PlowPilotは、介入認識モジュールを追加した点のみが異なります。したがって、観察された向上は、人間の介入を積極的にモデル化することによってもたらされています。これらの結果は、ユーザーの介入を予測することが、実世界の協調エージェントシステムの有効性と使いやすさを大幅に改善できるという初期の証拠を提供します。
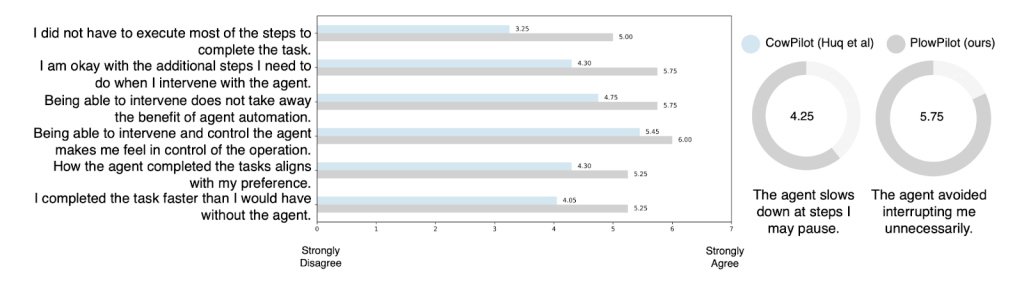 image図:研究終了時のリッカート尺度アンケートに対するユーザーの回答。平均して、ユーザーはCowPilotと比較して評価が26.5%高いと報告しています。
image図:研究終了時のリッカート尺度アンケートに対するユーザーの回答。平均して、ユーザーはCowPilotと比較して評価が26.5%高いと報告しています。
メディア:GoogleカレンダーでイベントをスケジュールするタスクにおけるPlowPilotの使用例。
最終的な考察
介入は、ユーザーの好みと協調スタイルを示すシグナルです。エージェントがこのシグナルをモデル化できれば、単なる自律的なツールから、適応的なパートナーへと進化することができます。
完全な自律性の最大化ではなく、人間とエージェントの間の境界を最適化することを私たちは提唱します。エージェントは行動するだけでなく、適切なタイミングで積極的に制御を人間に戻すことを学ぶべきです。この境界は適応的であるべきであり、ユーザー固有の相互作用と介入パターンを反映する必要があります。いつユーザーを関与させるかを学ぶことで、エージェントはより効率的で個人に合わせた協調を可能にします。この適応的ハンドオフを最適化することは、目標を自律性から協調的知能へと移行させ、監督の負担を減らしながら制御を維持することにつながります。
詳細はこちら:
ウェブエージェントにおける異なる人間の相互作用のモデル化
CowPilot:自律的および人間-エージェント協調ウェブナビゲーションのフレームワーク
原文を表示
jQuery('.post-authors').width(0.50 * jQuery('.post-authors').parent().width());
jQuery('.affiliations').width(0.30 * jQuery('.affiliations').parent().width());
jQuery('.date').width(0.20 * jQuery('.date').parent().width());
jQuery('.post-authors').empty();
jQuery('.post-authors').append('Authors
');
jQuery('.post-authors').append('F. Huq, ZZ. Wang, Z. Guo, VA. Arangarajan, T. Ou, F. Xu, S. Zhou, G. Neubig, JP. Bigham');
jQuery('.affiliations').append('CMU, Duke
');
jQuery('.doi').remove();
Recent advances in large language models (LLMs) have enabled AI agents to perform increasingly complex tasks in web navigation. Despite this progress, effective use of such agents continues to rely on human involvement to correct misinterpretations or adjust outputs that diverge from their preferences. However, current agentic systems lack an understanding of when and why humans intervene. As a result, they might overlook user needs and proceed incorrectly, or interrupt users too frequently with unnecessary confirmation requests.
This blogpost is based on our recent work — Modeling Distinct Human Interaction in Web Agents — where we shift the focus from autonomy to collaboration. Instead of optimizing agents solely for an end-to-end autonomous pipeline, we ask: Can agents anticipate when humans are likely to intervene?
CowCorpus: Learning from Real Interaction
To formulate this task, we collect CowCorpus – a novel dataset of interleaved human and agent action trajectories. Compared to existing datasets comprising either only agent trajectory or human trajectory, CowCorpus captures the collaborative task execution by a team of a human and an agent. In total, CowCorpus has:
400 real human–agent web sessions
4,200+ interleaved actions
Step-level annotations of intervention moments
We curate CowCorpus from 20 real-world users using CowPilot, an open-source artifact by the same research team. CowPilot is built as a generalizable Chrome extension, which is accessible to any arbitrary website. It is also easy to install, making the annotation process simpler for our participants. In CowPilot, we showed how collaboration works. In PlowPilot, we want to make it adaptive.
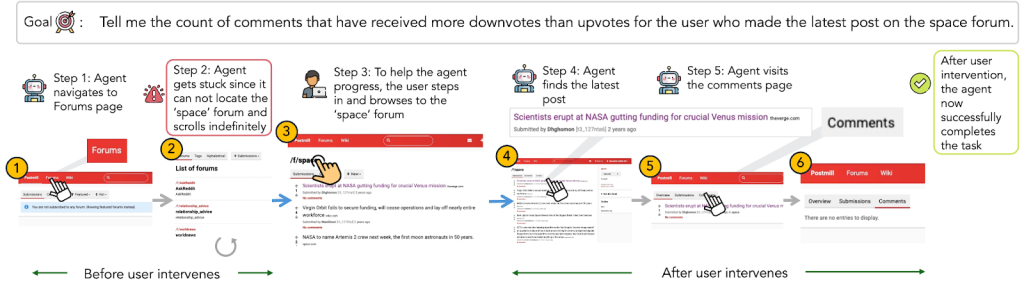 imageFigure: An example task from CowPilot
imageFigure: An example task from CowPilot
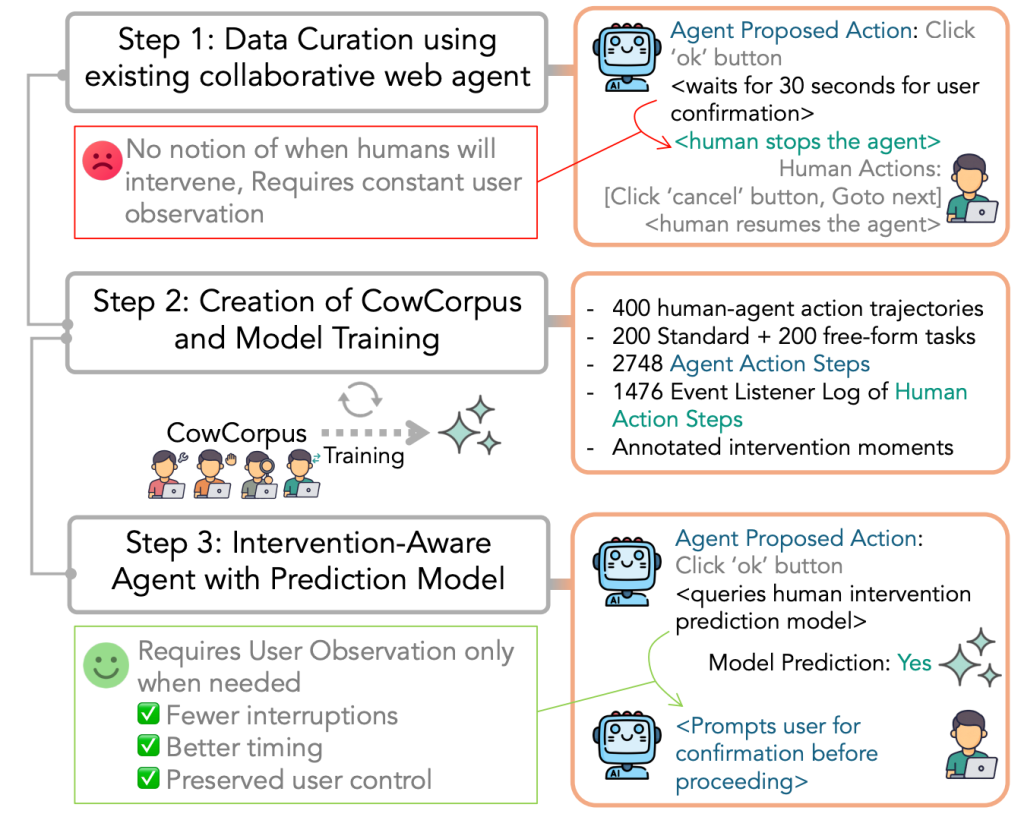 imageFigure: In this paper, we present CowCorpus, a dataset of 400 real-user collaborative web trajectories that captures when and how humans intervene during execution, enabling intervention-aware agents that engage users only when needed. First, we curate data using our previous collaborative agent, CowPilot. Second, we curate the data from real-world users. Lastly, we train an intervention prediction model that leads to our new pipeline for intervention-aware agents.
imageFigure: In this paper, we present CowCorpus, a dataset of 400 real-user collaborative web trajectories that captures when and how humans intervene during execution, enabling intervention-aware agents that engage users only when needed. First, we curate data using our previous collaborative agent, CowPilot. Second, we curate the data from real-world users. Lastly, we train an intervention prediction model that leads to our new pipeline for intervention-aware agents.
To ensure CowCorpus is consistent with established benchmarks and reflects individual user preferences, we designate a mixture of free-form tasks and benchmark tasks in our dataset —
10 standard tasks from the Mind2Web dataset (Deng et al., 2024): Helps us to understand how the collaborative nature varies among participants under the fixed task setup.
10 free-form tasks of the participants’ own choice: Helps us to understand what kind of web tasks people wish to automate.
In total, CowCorpus covers 9 types of task categories:
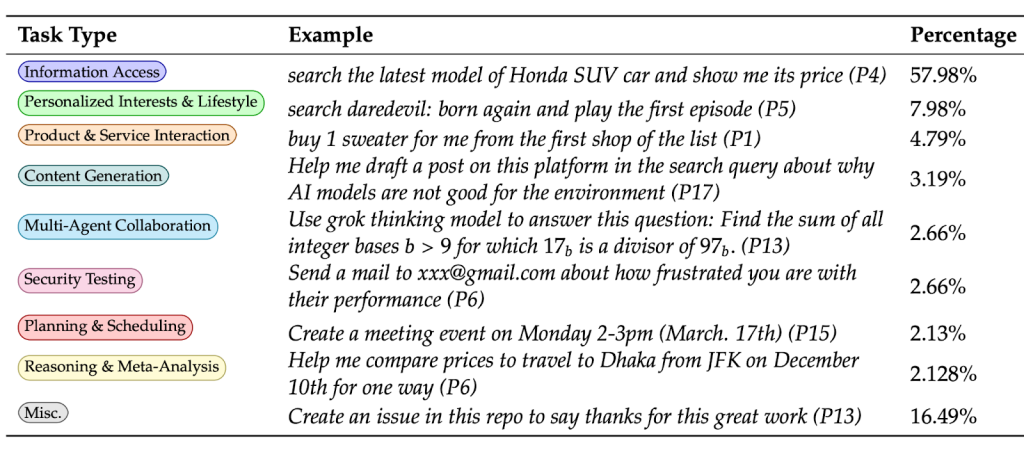 imageTable: Examples of free-form tasks across nine categories, with task description and distribution percentages.
imageTable: Examples of free-form tasks across nine categories, with task description and distribution percentages.
 imageTable: CowCorpus statistics for standard and free-form tasks: (1) intervention intensity: percentage of human actions across all trajectories, (2) step count: number of steps taken by agent or human actors, (3) time: time taken by agent or human actors.
imageTable: CowCorpus statistics for standard and free-form tasks: (1) intervention intensity: percentage of human actions across all trajectories, (2) step count: number of steps taken by agent or human actors, (3) time: time taken by agent or human actors.
Task-Level Interaction Patterns
We analyze when human interventions occur during collaborative task execution and how such temporal patterns vary across users. Using participant-level measures, we cluster users by interaction behavior with 𝑘-means (𝑘=4). This analysis reveals four distinct and stable groups of users with qualitatively different patterns of intervention timing and control sharing. Based on cluster centroids and representative trajectories, we characterize the four groups as follows:
Takeover: Users intervene infrequently and typically late in the task. When they do step in, they tend to retain control rather than returning it to the agent, resulting in low handback rates. These interventions often coincide with completing the task themselves rather than correcting the agent mid-execution.
Hands-on: Users intervene frequently and with high intensity. Their interventions tend to occur relatively late in the trajectory, but unlike Takeover users, they regularly alternate control with the agent, leading to medium handback rates and sustained joint execution.
Hands-off: Users rarely intervene throughout the task. They exhibit low intervention frequency and intensity, allowing the agent to execute most trajectories end-to-end with minimal human involvement.
Collaborative: Users intervene selectively and consistently return control to the agent. This group is characterized by high handback rates and earlier intervention positions, reflecting targeted, short-lived interventions that support ongoing collaboration.
Overall, users exhibit systematic differences in when interventions occur, how much they intervene, and whether control is relinquished afterward. Such temporal intervention patterns are consistent across tasks and motivate modeling distinct human–agent interaction patterns.
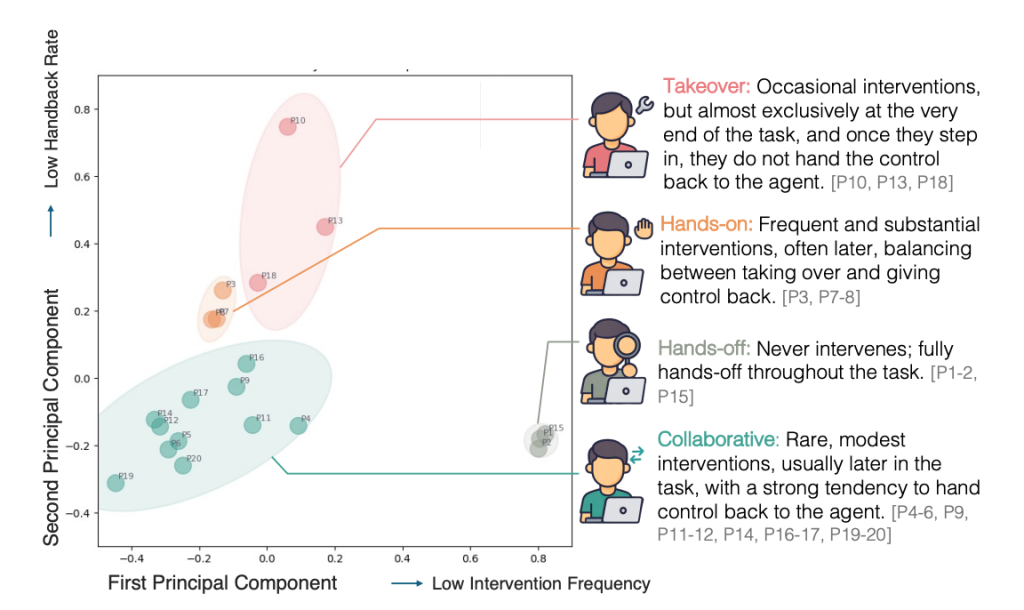 imageFigure: Four distinct types of human-agent interaction patterns: Takeover, Hands-on, Hands-off, and Collaborative. We visualize the user groups using PCA (left), and describe the interaction mechanism of each group (right)
imageFigure: Four distinct types of human-agent interaction patterns: Takeover, Hands-on, Hands-off, and Collaborative. We visualize the user groups using PCA (left), and describe the interaction mechanism of each group (right)
Modeling Intervention as Prediction
We model human–agent collaboration as a Partially Observable Markov Decision Process (POMDP). Given a task instruction, both the agent and human take turns executing actions based on their policies, forming a trajectory over time. At each step, the system observes the current state as a multimodal input consisting of the webpage screenshot and accessibility tree. The agent proposes an action conditioned on the observation and past trajectory. The human may intervene at any step, represented as a binary variable.
We formulate intervention prediction as a step-wise binary classification problem that estimates the probability of human intervention given the current state, agent action, and history. To solve this, we use a large multimodal model trained via supervised fine-tuning. The model takes as input the trajectory history, current observation, and proposed action, and outputs a decision to either request human input or allow the agent to continue.
We train (1) a general intervention-aware model using all training data and (2) style-conditioned models tailored to each interaction group using the corresponding subset of trajectories. To evaluate effectiveness, we compare these models against both prompting-based proprietary LMs and fine-tuned open-weight models on the Human Intervention Prediction task. Across all models, main takeaways are:
Proprietary Models remain overly conservative: We evaluate three families of closed-source LMs (Claude 4 Sonnet, GPT-4o, and Gemini 2.5 Pro) using zero-shot without reasoning. They struggle with the temporal dynamics necessary for accurate human intervention prediction. Notably, GPT-4o achieves high performance on non-intervention steps (Non-intervention F1: 0.846), but it fails on active interventions (Intervention F1: 0.198). The drastic F1 disparity indicates that generalist models are overly conservative and struggle to balance the dynamic with the need for proactive assistance.
Fine-tuned Open-weight Models with Specialized Data Beats Scale: In contrast, finetuning open-weight models on CowCorpus yields the most significant performance gains, surpassing proprietary models. Our fine-tuned Gemma-27B (SFT) achieves the state-of-the-art PTS (0.303), outperforming Claude 4 Sonnet (0.293), while the smaller LLaVA-8B (SFT) achieves a competitive PTS (0.201), beating GPT-4o (0.147). These results demonstrate that fine-tuning on high-quality interaction traces effectively bridges the alignment gap, allowing smaller models to master the nuance of intervention timing where generalized giant models fail
 imageTable: Model performance on predicting human intervention. We report F1 scores separately for intervention and non-intervention steps to account for class imbalance. Finetuned models outperform the proprietary models by a large margin.
imageTable: Model performance on predicting human intervention. We report F1 scores separately for intervention and non-intervention steps to account for class imbalance. Finetuned models outperform the proprietary models by a large margin.
From Modeling to Deployment: PlowPilot
We integrated our intervention-aware model into a live web agent, PlowPilot. Instead of asking for confirmation at every step, the agent now: 1) Predicts when intervention is likely; 2) Prompts only at high-risk moments or where user confirmation is likely to happen; 3) Proceeds automatically otherwise.
We reinvited our annotators and asked them to rate our new system. On average, we noticed a +26.5% increase in user-rated usefulness. The following figure highlights individual responses to each of 8 answers asked to them. Importantly, the underlying execution agent remains unchanged from CowPilot.; PlowPilot differs only by the addition of the intervention-aware module. The observed gains therefore, arise solely from proactively modeling human intervention. These findings provide initial evidence that anticipating user intervention can substantially improve the effectiveness and usability of collaborative agent systems in practice.
imageFigure: User response to the Likert scale questionnaire after the study. On average, users report 26.5% higher in user rating compared to CowPilot.
Media: An example task of using PlowPilot for scheduling a Google Calendar event.
Final Thought
Intervention is a signal of preference and collaboration style. If agents can model that signal, they become adaptive partners rather than just autonomous tools.
Rather than maximizing full autonomy, we advocate optimizing the human–agent boundary. Agents should learn not only to act, but to defer—proactively handing control back when appropriate. This boundary should be adaptive, capturing user-specific interaction and intervention patterns. By learning when to involve the user, agents enable more efficient and personalized collaboration. Optimizing this adaptive handoff shifts the goal from autonomy to collaborative intelligence, reducing oversight while preserving control.
For more details:
Modeling Distinct Human Interaction in Web Agents
CowPilot: A Framework for Autonomous and Human-Agent Collaborative Web Navigation
関連記事
あなたのハーネス、あなたの記憶
AIエージェントのハーネスはエージェント構築の主流となり、エージェントの記憶と密接に関連している。クローズドなハーネスを使用すると、エージェントの記憶制御を第三者に委ねることになる。記憶は優れたエージェント体験の構築に極めて重要である。
生成AI支援コーディングによるKaggleコンペ優勝
2026年3月、3つのLLMエージェントが60万行以上のコードを生成し850回の実験を実行して、Kaggleプレイグラウンドコンペティションで優勝を勝ち取った。
自動化
OpenAIはCodexにスケジュールとトリガーによる自動実行機能を追加した。Codexはこれにより、ユーザーの指示を待たずに定期的にタスクを自動実行する。